워커 그룹·스케일¶
운영자가 잡(job)을 어떤 종류의 워커에서, 몇 대로, 어떤 노드 위에서 실행할지를 정하는 방법을 설명한다. windforce는 잡의 tag(저자가 선언하는 안정적 계약)를 워커 그룹(클래스·자원·노드 배치를 가진 함대)에 매핑하고, 큐 깊이에 따라 KEDA로 자동 스케일하며, 이 모든 구성을 운영자 콘솔의 워커 그룹 registry에서 관리한다. 목표 규모는 단일 Postgres 위 약 1000개의 워커 pod다.
이 페이지는 운영자 관점의 "어떻게 쓰고 운영하나"를 다룬다. 결정의 근거가 필요하면 각 절 끝과 "더 보기"의 ADR 링크를 참고한다.
라우팅: tag → class → node pool¶
잡은 자기 manifest에 tag를 핀(pin)한다. 저자는 "내 잡엔 browser가 필요"처럼 tag만 선언하고, 그 tag가 실제로 어떤 이미지·노드풀·크기로 실행되는지(인프라 매핑)는 운영자가 tag 뒤에서 바꾼다. 즉 tag가 저자와 운영자 사이의 안정적 계약이고, 인프라 변경이 저자 코드에 새지 않는다.
라우팅은 세 단계로 합성된다.
flowchart TD
J["job manifest (tag pin)"] -->|"self-pin · 운영자 tag override"| G["worker group (Deployment, WORKER_TAGS=tag)"]
G -->|"resources · nodeSelector · runtimeClass · concurrency · env"| P["K8s node pool (taint + nodeSelector)"]
P -->|"per-tag 큐 깊이"| K["KEDA ScaledObject (오토스케일)"]- 워커 그룹은 하나의 K8s Deployment다.
WORKER_TAGS로 어떤 tag들을 구독할지 정하고, claim 시q.tag = ANY(worker_tags)로 자기 잡만 골라 실행한다. - 같은 tag를 구독하는 워커가 한 대도 없으면 그 tag의 잡은 영영 큐에 남는다(unserved). 콘솔의 tag coverage 화면이 이 간극을 danger로 잡아 준다(아래 "Fleet 관측" 참조).
노드 풀로 보내기 — taint와 nodeSelector 둘 다¶
특정 클래스를 전용 노드풀로 보내려면 두 가지를 함께 줘야 한다.
- taint(
dedicated=<class>:NoSchedule)는 다른 pod를 그 노드에서 밀어내기만 한다. - nodeSelector(
{pool, kubernetes.io/arch: arm64})가 워커 pod를 그 노드로 유도한다. - 그 노드의 taint를 견디려면 워커 그룹에 대응하는 toleration도 필요하다.
taint만 주고 nodeSelector를 빠뜨리면 워커가 다른 노드로 흩어지고, nodeSelector·toleration만 주고 taint를 빠뜨리면 다른 pod가 그 노드를 침범한다. 세 가지(taint·nodeSelector·toleration)가 한 세트다.
워커 클래스¶
windforce는 좁은 클래스를 많이 두지 않는다(매칭 안 되는 잡이 큐에 갇히고 용량이 파편화된다). 대신 넓은 클래스 몇 개를 둔다.
| 클래스 | 쓰임 | 이미지·특이점 |
|---|---|---|
general |
기본. 혼합 워크로드 | 기본 이미지, Burstable QoS로 밀집 |
cpu |
CPU-bound | compute 노드풀, Guaranteed 정수 코어, 코어당 1잡 |
mem |
메모리 집약(OOMKill 리스크) | mem 노드풀, Guaranteed로 예측성 |
browser |
헤드리스 브라우저(I/O-bound) | -browser 이미지(번들 Chromium) + Memory 기반 /dev/shm |
python |
CPython 런타임 잡 | -python 이미지 |
go |
Go 툴체인 잡 | -go 이미지 |
클래스를 고르면 렌더러가 그에 맞는 이미지 suffix와 (browser의 경우) Memory 기반 /dev/shm를 자동으로 파생한다. 예를 들어 browser를 고르면 -browser 이미지와 /dev/shm이 함께 따라오므로 절반만 구성된 상태가 생기지 않는다. /dev/shm은 클래스에서 파생되는 값이지 운영자가 직접 만지는 필드가 아니다(Chrome 기본 64Mi /dev/shm은 크래시를 유발한다).
다차원 요구(예: browser + 고메모리)는 결합 클래스를 새로 만들지 않고 합성 라벨(둘 다 요구)로 공유 풀에 매칭한다. 하드 파티션은 진짜 비대체 차원(arch, 특수 HW, 용량 격리)에만 둔다.
concurrency 모드¶
- CPU-bound 잡(
cpu)은 코어당 1잡(워커당 동시성 ≈ vCPU 수). - I/O-bound 잡(
browser·HTTP·SQL은 대기 위주)은 워커당 인프로세스 동시성을 높여 밀도를 얻는다.
워커당 동시 잡 수는 워커 그룹의 in_process_concurrency(env WORKER_JOB_CONCURRENCY)로 정한다.
워커 그룹 registry — 운영자 콘솔¶
워커 그룹의 구성은 control-plane DB의 worker_group registry가 정본(desired/intent)으로 소유한다. 운영자는 콘솔 /admin/worker-groups에서 그룹을 만들고 편집한다. 이 registry는 원하는 구성이고, 실제 함대(라이브 워커)는 worker_ping이 관측한다 — 콘솔은 둘을 대조해 drift를 표면화한다.
registry가 담는 주요 필드:
name(= Deployment 키) ·class·tags(구독 태그)desired_replicas(기준 replica, 오토스케일 floor)- 자원 프로파일(
cpu_request/cpu_limit/mem_request/mem_limit— requests==limits면 Guaranteed QoS) runtime_class(예: gVisor) ·node_selector·tolerations·envin_process_concurrency·autoscale_min/autoscale_max(KEDA 바운드) · KEDA 튜닝(target_queue_depth/polling_interval/cooldown_period)drain_timeout_s·enableddedicated_workspace_id(테넌트 전용 — 아래 참조)scheduling_profile(외부 배치 스케줄러 위임 — reference-only)
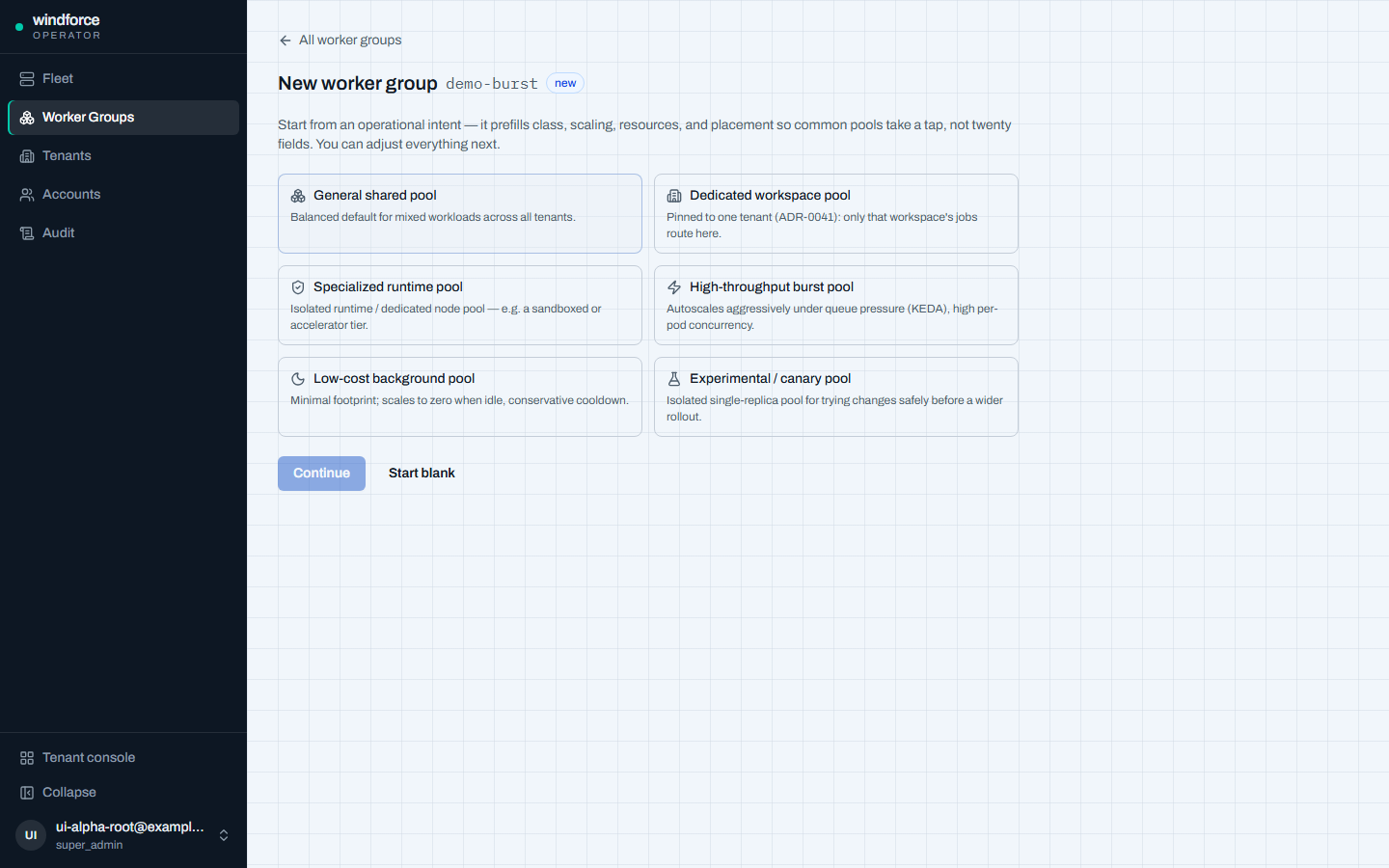
preset으로 만들기¶
새 그룹은 preset 우선으로 만든다. 운영 의도를 나타내는 ChoiceCard(general shared·dedicated workspace·specialized runtime·high-throughput burst·low-cost background·experimental canary) 중 하나를 고르면 class·스케일·자원·배치가 미리 채워진다. 빈 폼(Start blank)에서 시작할 수도 있다.
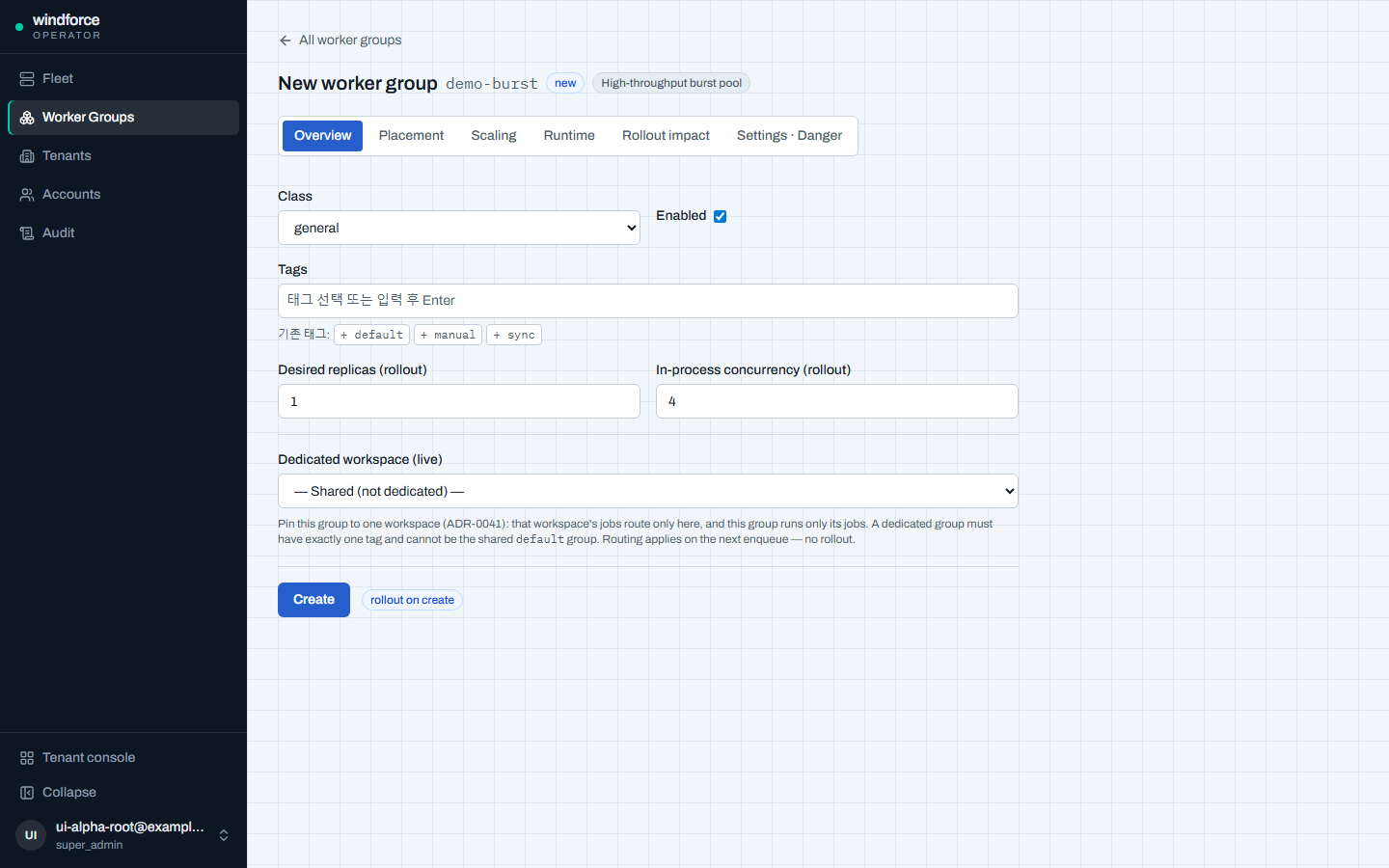
탭으로 편집하기¶
기존 그룹은 탭 IA로 편집한다 — Overview · Placement · Scaling · Runtime · Rollout impact · Settings · Danger. 검증 에러가 있는 탭에는 표식이 붙는다. 자유 텍스트 입력 대신 Select·stepper·구조화된 행 입력을 쓴다(예: tolerations는 구조화 행, scheduling_profile은 Placement 탭의 Scheduling(advanced)).
기존 그룹에 preset을 적용하려면 Apply preset…으로 명시적으로 적용하며, 변경되는 필드를 diff로 보여 준 뒤 적용한다(무음 덮어쓰기 없음).
즉시 반영 vs 롤아웃 필요¶
registry 편집은 반영 비용이 두 부류로 갈린다. 콘솔은 저장 전에 rollout impact diff(Rollout impact 탭 + 저장 버튼 옆 배지)로 둘을 구분해 보여 준다.
| 변경 | 반영 |
|---|---|
dedicated_workspace_id(테넌트 라우팅) |
즉시(다음 enqueue부터, 롤아웃 없음) |
class·이미지·자원·runtime_class·node_selector·tolerations·tags·env·desired_replicas·drain_timeout_s·in_process_concurrency·autoscale_min/max·KEDA 튜닝·scheduling_profile |
롤아웃 필요(pod template 변경) |
테넌트 재라우팅(dedicated_workspace_id)을 제외한 거의 모든 필드는 pod template을 바꾸므로 롤아웃을 유발한다. pod template은 in-place로 못 바꾼다.
어떻게 클러스터에 닿나 — GitOps 렌더¶
control plane은 K8s API를 직접 변이하지 않는다. registry 편집은 다음 단방향 경로로 머티리얼라이즈된다.
flowchart TD
REG[("worker_group registry (CP DB · desired)")]
REG -->|"render-workers (git write)"| GIT[("Flux repo (workers ConfigMap)")]
GIT -->|"Flux reconcile"| DEP["worker Deployments"]
DEP -->|"ping"| PING[("worker_ping (observed)")]
PING -->|"desired↔observed diff"| CON["operator console"]
REG --> CONwindforce render-workers서브커맨드가 registry를 읽어 HelmReleaseworkers:values를 렌더하고, 렌더러 소유 ConfigMap(workers-configmap.yaml)으로 감싸 Flux deploy repo에 커밋한다. 이후는 Flux가 git → 클러스터로 reconcile한다.- 렌더러 출력은 결정적(그룹·키 정렬)이라 registry가 안 바뀌면 byte-동일 → no-op 커밋을 스킵한다.
- registry 편집을 ConfigMap에 자동 반영하는 주기 실행(K8s CronJob)은 deploy repo write 자격증명이 있어야 동작한다. 그 자격증명을 프로비저닝하기 전까지 registry 편집은 intent-only이고(Fleet drift로 가시화) ConfigMap은 수동 렌더로 갱신한다.
KEDA 오토스케일¶
워커 그룹은 per-tag 큐 깊이에 따라 KEDA ScaledObject로 자동 스케일한다. registry에서 autoscale_min/autoscale_max를 설정하면(둘 다 설정하거나 둘 다 비우는 all-or-none) 그 그룹에 ScaledObject가 렌더된다.
핵심 동작:
- 장수 풀을 스케일한다(ScaledObject), 잡당 pod를 띄우지 않는다. claim 루프(claim→run→complete→claim)가 풀에 자연스럽게 매핑되고 워커를 warm하게 유지해 콜드 스타트를 피한다.
- 깊이 신호는 아직 claim되지 않은 잡(
running=false)만 센다. in-flight 잡을 세면 이중 계산으로 scale-in이 막힌다. - scale-in은 부드럽게 — stabilization 600s, 120초마다 pod 1개씩,
selectPolicy: Min. scale-to-zero(1→0)에는cooldownPeriod가 적용된다. - 비싼 클래스(예:
browser)는autoscale_min을 1로 둬(warm floor) 콜드 스타트를 피한다. - KEDA가 DB에 붙을 때는
windforce시크릿의DATABASE_URL을TriggerAuthentication으로 쓴다.
scale-in이 바쁜 워커를 죽여도 안전하다¶
오토스케일이 잡을 처리 중인 워커를 죽일 수 있다는 점은 쿠버네티스 레벨에서 best-effort일 뿐이라, 정확성을 거기 의존하지 않는다. windforce는 큐 스파인 자체가 안전망을 갖는다.
- claim CTE가
running=true, ping=now()를 원자적으로 설정하고, 워커가 heartbeat를 보낸다. - reaper가
ping IS NULL OR ping < threshold인 잡을 되살린다(at-least-once). heartbeat 10s · reclaim 60–90s로 잡 길이와 무관하게 빠르게 복구한다. - 잡 실행은 idempotent하고 완료는 단일 트랜잭션이라 재실행이 안전하다.
그래서 scale-in이 잡을 죽여도 reaper가 받아 다시 큐에 넣는다 — 오토스케일은 절대 정확성을 떠받치지 않는다.
KEDA 오토스케일은 기본 비활성(keda.enabled: false)이며 활성화는 한 줄(keda.enabled: true)이다.
배치 — 외부 배치 스케줄러 위임(reference-only)¶
테넌트별 용량 레인·pod 우선순위를 보장하려면 기본 K8s 스케줄러 대신 외부 배치 스케줄러(capacity-aware pod 스케줄러)에 워커 pod의 배치·용량을 위임할 수 있다. registry의 scheduling_profile(nullable jsonb)이 이를 표현한다.
핵심 경계:
- 배치 스케줄러는 잡 스케줄러가 아니다. windforce의 잡 정확성 정본은 어디까지나 PG 큐(claim/heartbeat/reaper)다. 외부 스케줄러는 장수 워커 Deployment의 pod 배치·용량에만 관여한다. 액션 잡마다 전용 pod를 만들거나 gang scheduling을 하지 않는다.
scheduling_profile이 담는 것:scheduler_name·priority_class_name·scheduler_queue.null이면 기본 스케줄러(위임 안 함).- 렌더러는 reference-only다 — pod template에
schedulerName+ (optional)priorityClassName+ 스케줄러 큐 이름 참조 annotation만 emit한다. 스케줄러 큐 정책 CR은 만들지 않는다(control plane이 K8s를 안 만지는 경계 보존). - 따라서
reclaimable·deserved·guarantee·weight같은 큐 용량 정책은 registry 밖이다 — 운영자가 별도 인프라 매니페스트/Flux로 소유한다. registry에 넣으면 "전용 그룹이 보호된다"는 거짓 보증이 될 수 있어 일부러 막았다. - 참조한 큐가 없으면 pod가 Pending이 되고, 기존 Fleet drift / tag coverage가 "라이브 워커 0"을 danger로 잡는다(nodeSelector 풀이 없을 때와 같은 진단 경로).
두 priority 축을 혼동하지 않는다¶
| 축 | 무엇을 정렬하나 | 메커니즘 | 선점성 |
|---|---|---|---|
| PG 잡 priority | 떠 있는 워커가 다음에 어떤 잡을 claim하나 | priority_band + aging |
비선점(running 잡은 항상 완료) |
| K8s pod priority | 워커 pod가 몇 대 스케줄·유지되나 | priorityClassName·스케줄러 큐 |
선점/reclaim 가능 |
"높은 우선순위 잡"과 "높은 우선순위 pod"는 다른 메커니즘이다.
scheduling_profile은 전부 pod spec이라 편집은 롤아웃을 유발한다. scheduler_name은 특정 스케줄러 제품에 묶이지 않는 임의 값이다(스케줄러 중립).
테넌트 전용 워커 그룹¶
특정 워크스페이스를 전용 워커 풀에 묶어 (a) 공유 풀의 부하·이웃과 격리하고(QoS), (b) 그 풀이 다른 테넌트 코드를 절대 실행하지 않게(보안·규제) 할 수 있다. windforce는 이를 새 claim 의미가 아니라 태그 라우팅으로 구현한다 — claim 스파인은 그대로다.
쓰는 법:
- 워커 그룹의
dedicated_workspace_id를 대상 워크스페이스로 설정한다. 워크스페이스당 전용 그룹은 최대 1개다. - 전용 그룹은 대표 태그 1개를 갖고, 그게 그 워크스페이스의 전용 태그가 된다.
- 이후 그 워크스페이스가 enqueue하는 모든 잡의 tag가 전용 태그로 강제된다(strict whole-workspace). 운영 재라우팅(requeue)도 이 전용 태그를 벗어나지 않는다.
격리는 라우팅에서 자연 발생한다 — 전용 그룹 워커만 그 태그를 구독하므로 (a) 그 워크스페이스 잡은 전용 그룹에서만 claim되고, (b) 그 태그를 그 워크스페이스 잡만 달고 있어 그 그룹은 그 워크스페이스 잡만 실행한다. 추가 claim 로직 없이 양방향 격리가 성립한다.
dedicated_workspace_id는 enqueue-time 라우팅이라 즉시 반영(다음 enqueue부터)되는 유일한 라이브 레버다 — 롤아웃이 필요 없다. 전용 그룹의 태그를 다른 그룹이 구독하면 격리가 깨지므로, 콘솔이 전용 태그의 단일 구독을 강제하고 공유 default 그룹은 전용화할 수 없다. 전용 그룹에 라이브 워커가 0이면 그 워크스페이스 잡이 영영 큐에 새므로, Fleet tag coverage·drift가 그 danger를 표면화한다.
전용 테넌트 레인은 spot/선점에서 잡 재실행이 늘 수 있으니, non-reclaimable 큐 + PodDisruptionBudget을 권장한다.
Fleet 배치 관측¶
운영자는 함대 배치를 봐야 한다 — "어느 그룹이 어느 노드에 떴나, 한 노드에 몰렸나, 왜 Pending인가". 그런데 control plane은 K8s API를 직접 읽지 않으므로(GitOps 단방향 경계), 배치 가시화를 2-tier 데이터 소싱으로 푼다. 콘솔과 operator API는 항상 PG만 읽는다.
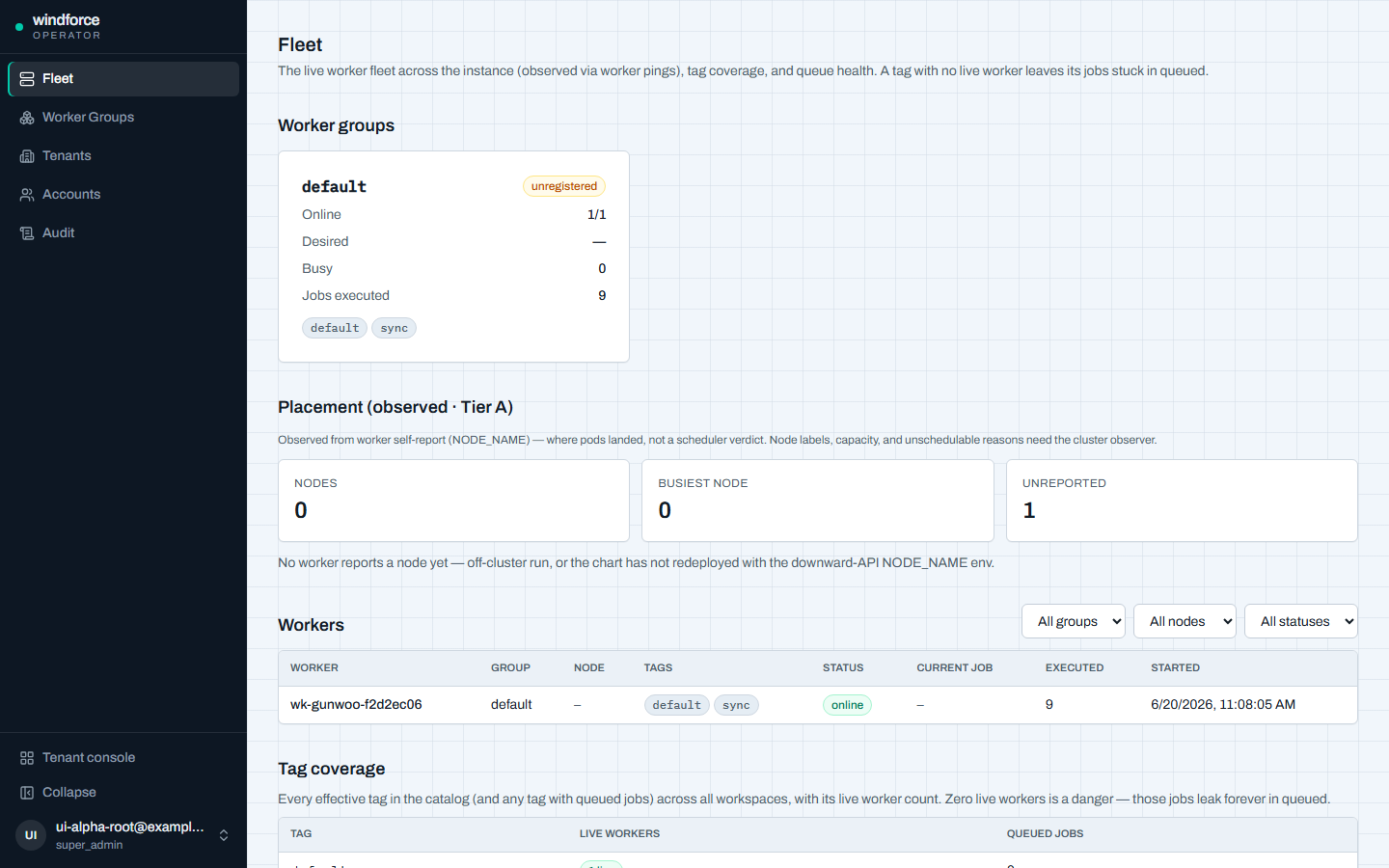
Tier A — 워커 self-report¶
워커가 자기 NODE_NAME(downward API의 spec.nodeName)을 ping에 실어 worker_ping.node_name으로 보고한다. CP→K8s 호출이 0이고, 이것만으로 다음을 얻는다.
- 관측된 노드 배치(파드↔노드)·노드 분포 요약·단일 노드 집중 경고
- 그룹 × 노드 placement 매트릭스(drill-down)
- 워커 표의 Node 컬럼, group/node/status 필터
node_name은 nullable best-effort다(로컬·direct·비-K8s 실행에선 null). 노드 정보는 super_admin 전용이다(workspace-scoped 뷰로 노드명을 누출하지 않는다).
Tier A는 또 그룹별 placement_needs_attention 힌트를 낸다 — enabled이고 desired>0인데 online 워커가 0이고 배치 제약(node selector·toleration·runtime class·스케줄링 프로파일)을 가진 그룹. 다만 이건 주의가 필요할 수 있다는 힌트일 뿐이다. 원인은 Flux 지연·이미지 pull 실패·crashloop·scale-to-zero·무 큐압 등 다양해서, 진짜 Unschedulable/pending 사유는 Tier B가 있어야 안다.

Tier B — read-only cluster observer¶
진짜 노드 라벨·용량, selector↔label schedulability, Pending 사유, discovery(노드 라벨·런타임 클래스·스케줄러 큐)는 K8s를 읽어야 안다. 이를 위해 control plane 밖 별도 read-only observer(windforce observe 프로세스)가 K8s를 읽어 PG의 observed/discovery 테이블에 적재하고, 콘솔은 PG만 읽는다.
- observer는 K8s를 읽기만 한다(
get/list/watch). 절대 쓰지 않는다. - CP(server/worker)와 분리된 별도 프로세스·별도 ServiceAccount다(trust boundary·RBAC·failure mode를 CP에서 분리).
- 주기적으로(
OBSERVER_INTERVAL_S, 기본 30s) 클러스터를 LIST해 전체 스냅샷을 한 트랜잭션으로 교체한다. 클러스터 밖에서 띄우면 no-op이라 로컬·dev-stack에선 아무 일도 안 한다.
observer가 풀어 주는 것:
- Fleet 카드가 Tier A 힌트 대신 실제 Unschedulable/pending 사유를 표시
- 노드 라벨·용량
- Placement 탭의 discovery 피커(실제 node label·runtime class·scheduler queue) — 운영자가 존재하지 않는 라벨·큐를 고르는 일을 막는다
source tier를 섞지 않는다¶
모든 placement/status 필드는 출처 tier를 구분한다 — Tier A(heartbeat: worker_ping self-report·queue-health·tag-coverage·registry 대조) vs Tier B(observer 유래 K8s node/pod/discovery). /api/admin/fleet 응답이 observer status(설치 여부·신선도)를 노출해 콘솔이 heartbeat 사실과 스케줄러 사실을 같은 신뢰도로 섞지 않게 한다.
observer가 설치되지 않았으면 콘솔은 discovery 피커를 mock 없이 "observer not installed"로 비활성한다. observer는 기본 비활성(observer.enabled=false)이고, 켜면 read-only ClusterRole·ServiceAccount·observer Deployment(HTTP 서버 없음, 1 replica)가 추가된다.
규모 — 약 1000 pod / 4000 동시 잡¶
잡이 분~시간 단위라 1000 pod × 워커당 동시성 4(= 4000 동시 잡)여도 claim rate는 초당 수십 건에 그친다. 처리량은 병목이 아니다. 진짜 위험은 MVCC·연결 fan-in·공정성 recount이고, 이를 단계별(싼 것부터, 신호 기반)로 다룬다.
이미 적용된 핵심 메커니즘:
- claim을 빨리 commit하고 잡 실행은 트랜잭션 밖에서 한다.
running=true, ping=now()를 즉시 commit해 긴 스냅샷이 dead tuple을 쌓지 않게 한다(분~시간 잡을 claim 트랜잭션에 쥐면 큐가 죽는다). - PgBouncer(transaction 모드) 풀러로 1000 pod의 연결을 흡수한다(워커만 풀을 통과, 서버/마이그레이션은 직결). atomic claim은
FOR UPDATE가 한 트랜잭션이라 transaction 모드에서 안전하다. 활성화는 helmdatabase.poolerHost한 줄(기본 비활성). - 큐 테이블 autovacuum 튜닝(naptime·scale_factor 낮춤).
- 단일 batch-claim 폴러 — 워커가 N개 독립 폴러 대신 빈 슬롯 수만큼 한 쿼리로 claim하고 N 슬롯에 디스패치한다(폴러 4000→1000).
- 빈 폴 backoff + jitter — 빈 큐면 0.5s부터 5s까지 지수 backoff + ±30% jitter. 슬롯이 다 차면 폴을 멈춰(park) busy 워커의 claim 부하를 0으로 만든다.
KEDA의 깊이 쿼리는 COUNT(*)가 무거워지면 counter/summary 또는 reltuples 추정으로 옮길 수 있다. 큐 테이블 파티셔닝·push dispatcher·off-Postgres는 이 워크로드 규모에선 불필요하다(초당 수십 claim은 off-Postgres 임계에 한참 못 미친다).
멀티테넌트 공정성¶
워커 클래스는 클래스 간 자원 격리지 같은 클래스 큐의 테넌트 간 공정성이 아니다. 한 워크스페이스의 대량 백로그가 풀을 독점하지 못하게 claim 시점에 공정성을 넣는다.
- per-(workspace, tag) 동시성 cap — claim 시 cap을 넘긴 워크스페이스를 set-exclusion으로 빼고 나머지를 정렬해 claim한다(cap-then-claim). SKIP-LOCKED와 안전하게 공존한다.
- priority + aging — 잡은
priority_band로 정렬되고, 오래 대기한 잡은 주기적 백그라운드 UPDATE로 band를 한 단계씩 승급한다(starvation 방지). 건강한 큐에선 매칭이 0이라 무동작이다.
운영 메모¶
- drain: 워커가 SIGTERM을 받으면 claim을 멈추고 in-flight 잡을 완료(heartbeat 유지)한 뒤 exit 0한다.
terminationGracePeriodSeconds는 넉넉하되 bounded(예: 1800s)로 둔다. 다만 장수 잡은 grace로 보호되지 않으니(Cluster Autoscaler 600s 강제 kill, spot reclaim) 안전망은 항상 reaper다 — grace는 불필요한 재실행을 줄이는 최적화일 뿐이다. drain 중 scale-to-zero를 막으려면cooldownPeriod ≥ terminationGracePeriodSeconds로 둔다. - 동적 설정 한계: tag→노드풀/크기 재매핑,
in_process_concurrency, autoscale 바운드는 모두 pod template 변경이라 현재는 롤아웃이 필요하다(in-place 핫리로드는 미구현 계획). - 비용: 유휴 비싼 클래스는 scale-to-zero(+warm floor)로 줄인다. spot/preemptible은 idempotent·requeue-safe 클래스만 쓴다(reclaim 창이 잡 drain 시간보다 짧으면 SIGKILL → reaper가 받지만 재실행이 는다). 장수·비-idempotent 클래스는 on-demand + PodDisruptionBudget으로 둔다.
더 보기¶
- 배포·운영 — Kubernetes 배포, GitOps, CI/CD
- 핵심 개념 — Workspace·App·Action·Job·tag
- 기술 심층 리포트(운영과 스케일 · 큐깊이 오토스케일링 · 배치 라이프사이클 desired→rendered→observed): windforce-technical-report.md
- 워커 그룹핑 정책 정본(클래스 택소노미·KEDA·공정성·규모): worker-grouping.md
- 운영자 평면 계약(Fleet IA·
/api/admin계약·registry 스키마): operator-plane.md - Fleet 배치 observer(Tier B 컴포넌트): fleet-observer.md
- 결정 기록(왜): ADR-0034 registry·GitOps 렌더 · ADR-0041 테넌트 전용 그룹 · ADR-0046 registry 표현력 · ADR-0047 배치 위임 · ADR-0048 2-tier 배치 관측